一文讀懂大數據Hadoop 核心技術、生態系統與在線數據處理應用
隨著互聯網、物聯網和人工智能的飛速發展,數據正以前所未有的規模和速度增長,大數據技術應運而生,成為推動數字化轉型的核心引擎。其中,Hadoop作為大數據領域的基石性框架,深刻改變了我們存儲、處理和分析海量數據的方式。本文將系統梳理Hadoop的核心原理、技術生態,并探討其在大數據技術棧中的關鍵作用,特別是在線數據處理與交易處理業務(OLTP)的相關應用與演進。
一、Hadoop:大數據處理的基石
Hadoop是一個開源的分布式系統基礎架構,由Apache基金會開發。它的核心設計目標是能夠以可靠、高效、可擴展的方式處理海量數據(從GB到PB級別)。其成功主要歸功于兩大核心組件:
- HDFS (Hadoop Distributed File System):即分布式文件系統。它將大文件自動切分成多個數據塊(默認128MB或256MB),并冗余存儲在多臺廉價商用服務器上,從而提供了極高的容錯性和吞吐量。其“一次寫入,多次讀取”的模型非常適合大數據批處理場景。
- MapReduce:一種分布式并行編程模型。它將計算任務分為兩個主要階段:“Map”(映射)和“Reduce”(歸約)。Map階段將任務并行化處理各個數據塊,Reduce階段則對Map的中間結果進行匯總。這種模型屏蔽了底層分布式計算的復雜性,使開發者可以專注于業務邏輯。
二、Hadoop生態系統:超越MapReduce
Hadoop早已超越其最初的“雙核”,發展成為一個龐大且充滿活力的生態系統,圍繞HDFS形成了多種互補的工具,以應對不同場景:
- 數據管理與計算引擎:
- YARN: Hadoop 2.0引入的資源調度和管理框架,它將資源管理與作業調度/監控分離,使得Hadoop可以運行除MapReduce之外的計算框架(如Spark、Flink),成為集群的“操作系統”。
- Apache Spark:基于內存計算的快速、通用大數據處理引擎,在迭代計算和交互式查詢上比MapReduce快數十到上百倍,已逐漸成為批處理和流處理的主流選擇。
- Apache Flink:真正意義上的流處理優先框架,以高吞吐、低延遲、精確一次(Exactly-once)的狀態一致性著稱,是實時計算領域的重要力量。
- 數據倉庫與查詢:
- Apache Hive:構建在Hadoop之上的數據倉庫工具,提供類似SQL的查詢語言(HiveQL),將SQL語句轉換為MapReduce/Spark/Tez作業,降低了大數據查詢的門檻。
- Apache HBase:一個分布式、面向列的NoSQL數據庫,構建在HDFS之上,適合實時讀寫和隨機訪問海量稀疏數據,彌補了HDFS隨機讀寫能力的不足。
- 數據采集與協調:
- Apache Kafka:高吞吐量的分布式發布-訂閱消息系統,常作為實時數據管道和流應用的核心。
- Apache ZooKeeper:分布式應用的協調服務,提供配置維護、命名服務、分布式同步和組服務。
三、大數據技術棧與在線數據處理交易(OLTP)業務
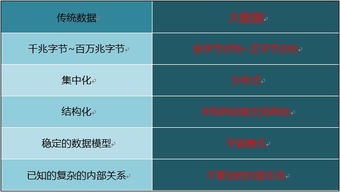
在線數據處理與交易處理業務(OLTP)是傳統數據庫的核心領域,其特征是大量用戶并發執行短小、快速的增刪改查操作,強調高并發、低延遲和強事務一致性(ACID)。典型場景包括銀行轉賬、電商下單、票務系統等。
傳統關系型數據庫(如Oracle, MySQL)在OLTP場景中表現出色,但當面對海量數據、高并發和半結構化/非結構化數據時,其擴展性和成本面臨挑戰。大數據技術在此領域的應用,并非簡單取代傳統OLTP數據庫,而是通過融合與演進,開辟了新的解決方案:
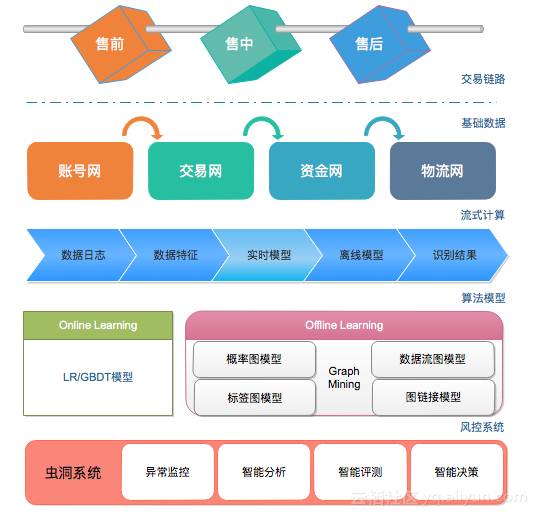
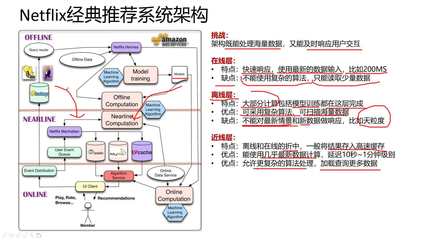
- 分層架構與Lambda/Kappa架構:現代大數據平臺常采用分層設計。原始交易數據通過Kafka等工具實時攝入,一方面存入HDFS或數據湖(如Iceberg, Hudi)供批處理和歷史分析(使用Hive, Spark),另一方面通過Flink等流處理引擎進行實時分析、風控和預警。這實現了離線與在線的融合。
- HTAP數據庫的興起:混合事務/分析處理數據庫成為新趨勢。這類系統(如TiDB, OceanBase)旨在同一套架構下同時處理OLTP事務和OLAP分析,減少數據搬運,提供實時洞察。它們借鑒了分布式系統的思想,與Hadoop生態形成競爭與互補。
- 大數據技術對OLTP的增強:
- 用戶行為分析與實時推薦:用戶的每一次點擊、瀏覽、交易都被實時采集。通過Spark Streaming或Flink處理這些流數據,結合歷史數據(存儲在HDFS),可以在秒級內完成用戶畫像更新和個性化推薦,直接提升交易轉化率。
- 實時欺詐檢測與風控:在支付、信貸等交易發生時,系統可以實時調用基于Flink構建的風控模型,對交易模式、設備、位置等信息進行毫秒級分析,攔截可疑交易,保障交易安全。
- 交易數據的全局分析與洞察:將所有交易數據歸集到Hadoop數據湖中,利用Hive、Spark SQL進行跨業務、跨歷史周期的深度分析,如客戶生命周期價值分析、市場趨勢預測、反洗錢等,這些分析結果反過來可以優化前臺的交易規則和策略。
- NewSQL與云原生數據倉庫:以Google Spanner為理念的NewSQL數據庫,以及Snowflake、BigQuery等云原生數據倉庫,提供了彈性擴展、強一致且支持SQL的全球級服務,它們正在重塑大規模OLTP和數據分析的邊界。
###
Hadoop開啟了大數據的分布式處理時代,其生態系統不斷豐富,從批處理擴展到流處理、交互式查詢和機器學習。在在線數據處理與交易領域,大數據技術并非顛覆傳統OLTP,而是通過實時流處理、數據湖分析、HTAP融合等方式,極大地擴展了“處理”的邊界,實現了從“記錄交易”到“智能驅動交易”的跨越。隨著云原生、存算分離、AI融合等技術的發展,大數據技術將繼續深化其在實時、智能業務場景中的應用,成為數字經濟不可或缺的基礎設施。
如若轉載,請注明出處:http://www.kendian.cn/product/70.html
更新時間:2026-06-02 13:40:48